#include
<at89x52.h>
char
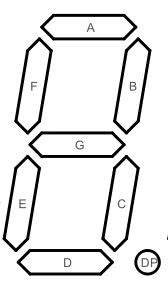
seg7[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
char
seg_data[]={0xa4,0xc0,0xf9,0x80};
char seg_data1[]={0xc0,0x82,0xc0,0x90};
char
seg_data2[]={0x82,0xf8,0x80,0x90};
char
left_move[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
char
increase[]={0x01,0x03,0x07,0x0f,0x1f,0x3f,0x7f,0xff};
char
increase2[]={0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe,0xff};
unsigned char scanline=0x80;
sbit
sw1=P3^7;//left
sbit
sw2=P3^6;//right
int k,x=0;
void
delay_1ms(int x)
{
int i,j;
for(i=0;i<x;i++)
for(j=0;j<114;j++)
;
}
void
debouncer()
{
int i,j;
for(i=0;i<20;i++)
for(j=0;j<114;j++)
;
}
void init()
{
int i;
for(i=0;i<2;i++)
{
P0=0x00;P2=0x00;P1=0XFF;delay_1ms(200);P0=0xFF;P2=0x00;P1=0XFF;delay_1ms(200);
}
for(i=0;i<2;i++)
{
P1=0XFF;P2=0xFF;P0=0x0F;delay_1ms(200);P1=0XFF;P2=0x00;P0=0x0F;delay_1ms(200);
}
P0=0XFF;
for(i=0;i<2;i++)
{
P1=0x00;P0=0xff;P2=0x00;delay_1ms(200);P1=0xff;P0=0xff;P2=0x00;delay_1ms(200);
}
P1=seg7[k];
}
main()
{
init();
IE=0x82;
TMOD=0x01;
TH0=(65536-20000)/256;
TL0=(65536-20000)%256;
TR0=1;
while(1)
{
if (k==1)
{
P2=0x00;
P1=seg7[k];
P0=0x00;delay_1ms(200);
P0=0xff;delay_1ms(200);
// LED
循環不斷閃爍
}
if (k==2)
{
int i;
P2=0x00;
P1=seg7[k];
if(x==0)
{
for(i=0;i<=7;i++)
{
P0=~left_move[i];delay_1ms(200);
}
x=1;
}
else
if(x==1)
{
P0=0xff;
}
}
//LED 單顆左移,這種方法叫什麼控制
if (k==3)
{
int i;
P2=0x00;
P1=seg7[k];
if(x==1)
{
for(i=7;i>=0;i--)
{
P0=~left_move[i];delay_1ms(200);
}
x=0;
}
if(x==0)
{
P0=0xff;
}
//LED
單顆右移
}
if(k==4)
{
int i;
P2=0x00;
P1=seg7[k];
if(x==0)
{
for(i=0;i<=7;i++)
{
P0=~increase[i];delay_1ms(200);
}
x=1;
}
if(x==1)
{
P0=0xff;
}
//
LED 左移漸亮(逐一多顆亮)
}
if (k==5)
{
//LED 右移漸亮(逐一多顆亮)
int i;
P2=0x00;
P1=seg7[k];
if(x==1)
{
for(i=0;i<=7;i++)
{
P0=~increase2[i];delay_1ms(200);
}
x=0;
}
if(x==0)
{
P0=0xff;
}
}
if (k==6)
{
int i,j;
P1=seg7[k];
for(j=0;j<=100;j++)
{
scanline=0x80;
for(i=0;i<=3;i++)
{
P2=0x00;//要先關掉四位數七段顯示器,否則無法正常顯示
P0=~scanline;
P2=~seg_data[i];delay_1ms(4);
scanline=scanline>>=1 ;
}
}
for(j=0;j<=100;j++)
{
scanline=0x80;
for(i=0;i<=3;i++)
{
P2=0x00;//要先關掉四位數七段顯示器,否則無法正常顯示
P0=~scanline;
P2=~seg_data1[i];delay_1ms(4);
scanline=scanline>>=1 ;
}
}
// 四位七段出現 2018 及 0609 交替顯示。
for(j=0;j<=100;j++)
{
scanline=0x80;
for(i=0;i<=3;i++)
{
P2=0x00;//要先關掉四位數七段顯示器,否則無法正常顯示
P0=~scanline;
P2=~seg_data2[i];delay_1ms(4);
scanline=scanline>>=1 ;
}
}
}
if (k==0)
{
P1=seg7[k];
P0=0xFF;P2=0x00;
//LED、 四位、七段均需熄滅
}
if (k==7)
{
P1=seg7[k];
P0=0xFF;P2=0x00;
//LED、 四位、七段均需熄滅
}
if (k==8)
{
P1=seg7[k];
P0=0xFF;P2=0x00;
//LED、 四位、七段均需熄滅
}
if (k==9)
{
P1=seg7[k];
P0=0xFF;P2=0x00;
//LED、 四位、七段均需熄滅
}
}
}
void
my_time0(void) interrupt 1
{
TH0=(65536-20000)/256;
TL0=(65536-20000)%256;
if (sw1==0)
{
debouncer();
while(sw1!=1);
debouncer();
k=k+1;
if (k>9) k=0;
}
if (sw2==0)
{
debouncer();
while(sw2!=1);
debouncer();
k=k-1;
if (k<0) k=9;
}
}