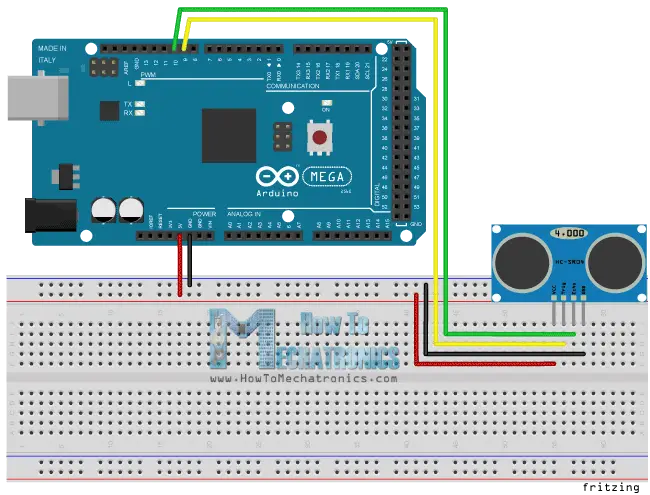
const int trigPin = 12;
const int echoPin = 13;
long duration;
int distance;
int range=20;
int num_val=(range/10);//距離是20,分10等分num_val=2
void setup()
{
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600); // Starts the serial communication
for(int i=2;i<12;i++)
{
pinMode(i,OUTPUT);
}
}
void loop()
{
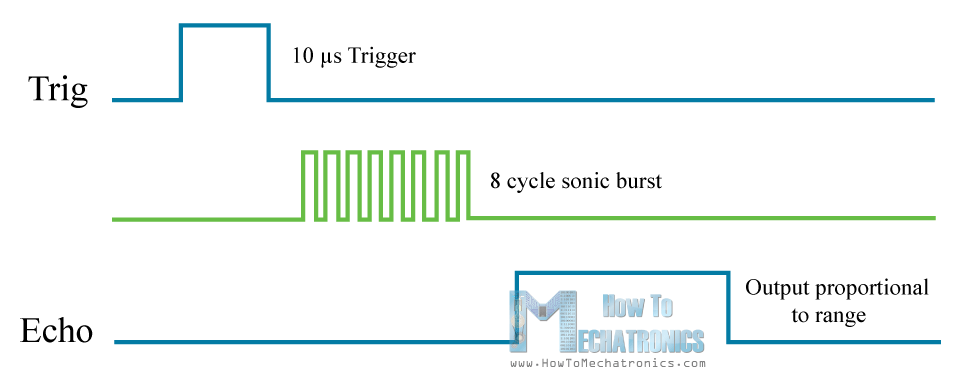
digitalWrite(trigPin, LOW);// Clears the trigPin
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);// Sets the trigPin on HIGH state for 10 micro seconds
delayMicroseconds(10);
digitalWrite(trigPin, LOW);// Reads the echoPin, returns the sound wave travel time in microseconds
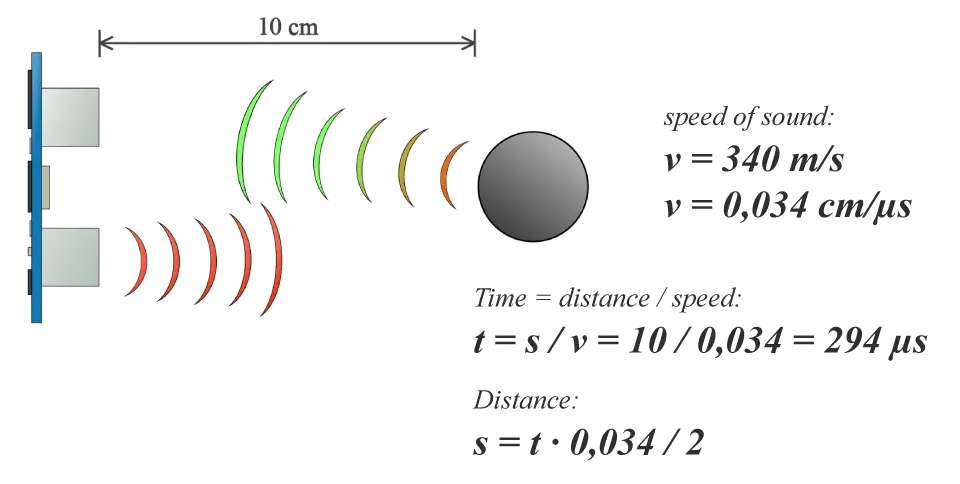
duration = pulseIn(echoPin, HIGH);// Calculating the distance
distance= duration*0.034/2;// Prints the distance on the Serial Monitor
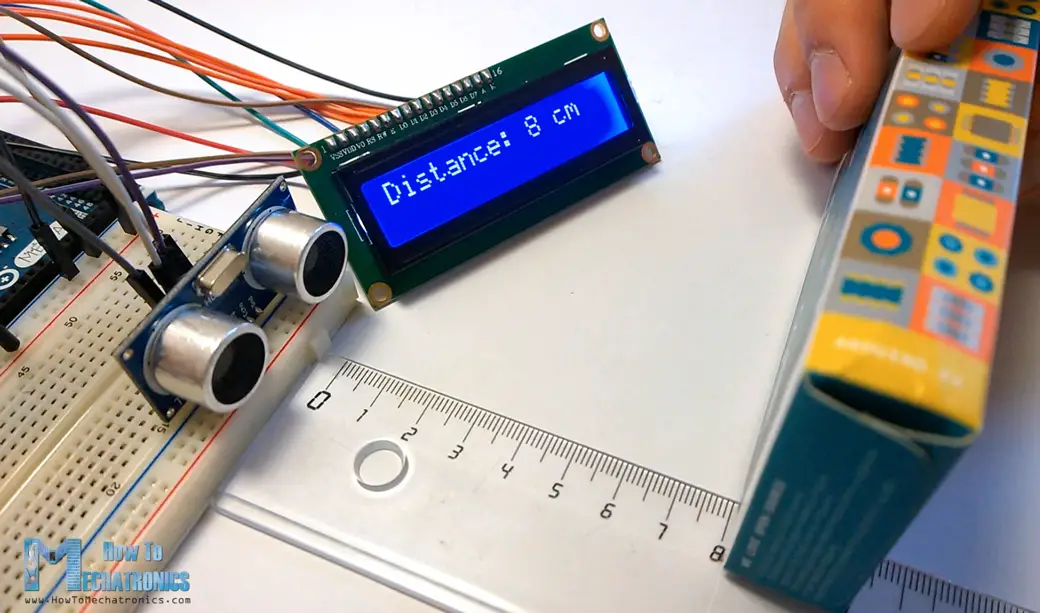
Serial.print("Distance: ");
Serial.println(distance);
//--------------------------------------
for(int i=2;i<12;i++)//每次把led關掉
{
digitalWrite(i,LOW);
}
if(distance<=range)//量出20才做這件事,距離18/2=9等分亮9個燈,愈靠近燈亮愈多
{
for(int j=2;j<(11-(distance/num_val))+2;j++)//(20/2)=10變(11-10)+2=3,因為從2開始
{//(11-2)+1共10等分, 2<3, 只亮pin2 ,if distance=0 2<13
digitalWrite(j,HIGH);//為什麼從2,因為led從pin 2開始
}
}
}